
جمع جزء 0 تومان
کاربردهای رایج در سیستم های رباتیک
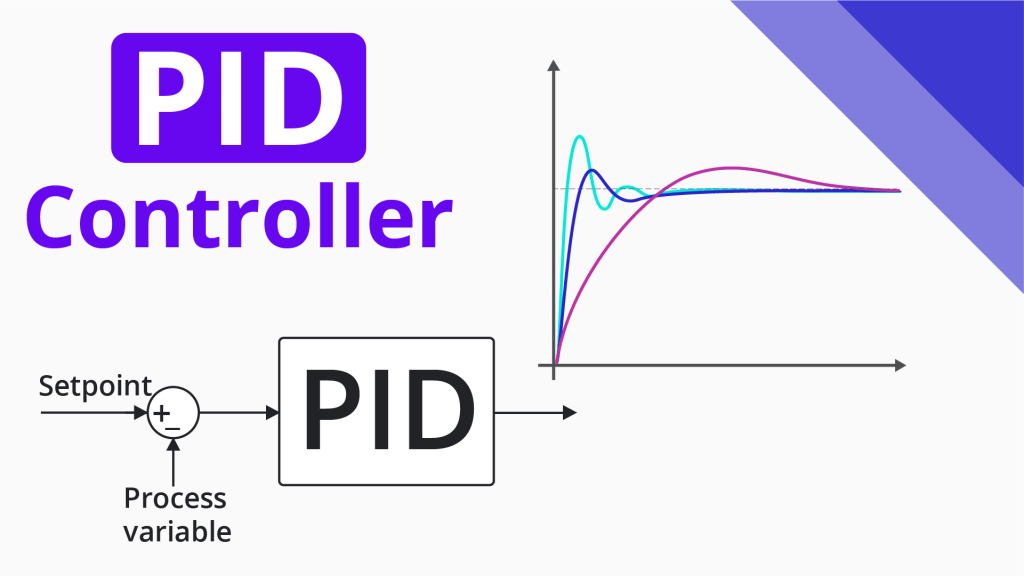
کنترلرهای PID در طیف گسترده ای از کاربردهای روباتیک استفاده می شوند. یکی از کاربردهای رایج در کنترل موتور است، جایی که آنها سرعت و موقعیت بازوهای رباتیک، چرخها و محرکها را تنظیم میکنند. به عنوان مثال، در بازوهای رباتیک، کنترلکنندههای PID با تنظیم ورودیهای موتور بر اساس موقعیت و سرعت مورد نظر، حرکت روان و دقیق را تضمین میکنند.
در روباتهای متحرک، کنترلکنندههای PID با کنترل موتورهایی که چرخها را به حرکت در میآورند، به حفظ یک مسیر ثابت و دقیق کمک میکنند. آنها همچنین در ربات های متعادل کننده مانند ربات های دو چرخ استفاده می شوند، جایی که آنها به طور مداوم خروجی موتور را برای حفظ تعادل و ثبات تنظیم می کنند.
کاربرد دیگر در کنترل پرواز پهپاد است. کنترلرهای PID جهت گیری و پایداری پهپادها را با تنظیم سرعت روتور بر اساس زوایای گام، رول و انحراف مورد نظر مدیریت می کنند. این امر پرواز صاف و پایدار را حتی در صورت وجود اختلالاتی مانند باد یا حرکات ناگهانی تضمین می کند.